|
|



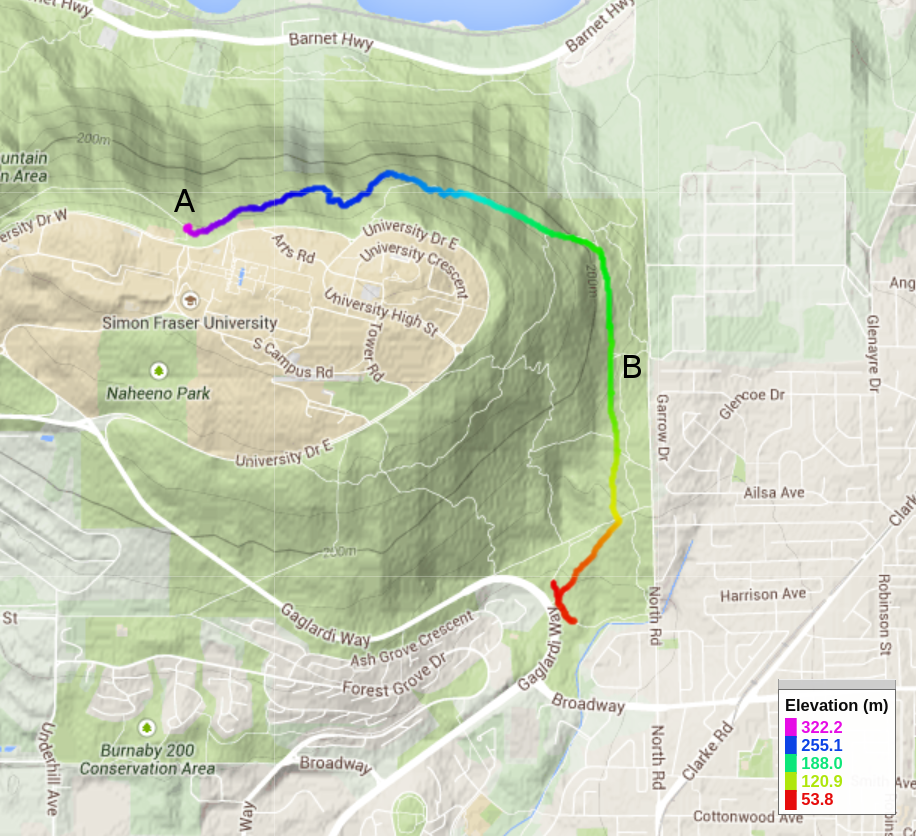
The SFU Mountain Dataset consists of several hundred GB of sensor data recorded from Burnaby Mountain, British Columbia, Canada. Seven traversals are provided, covering an entire year of changing environmental conditions including sun, rain, snow, and midnight. Each traversal covers 4km of woodland trails with a 300m altitude change. Recordings include full video from 6 cameras, range data from 2 LIDAR sensors, GPS, IMU and wheel encoders, plus calibration parameters for each sensor, and we provide the data in the form of ROS bag files, JPEG image files, and CSV text files.
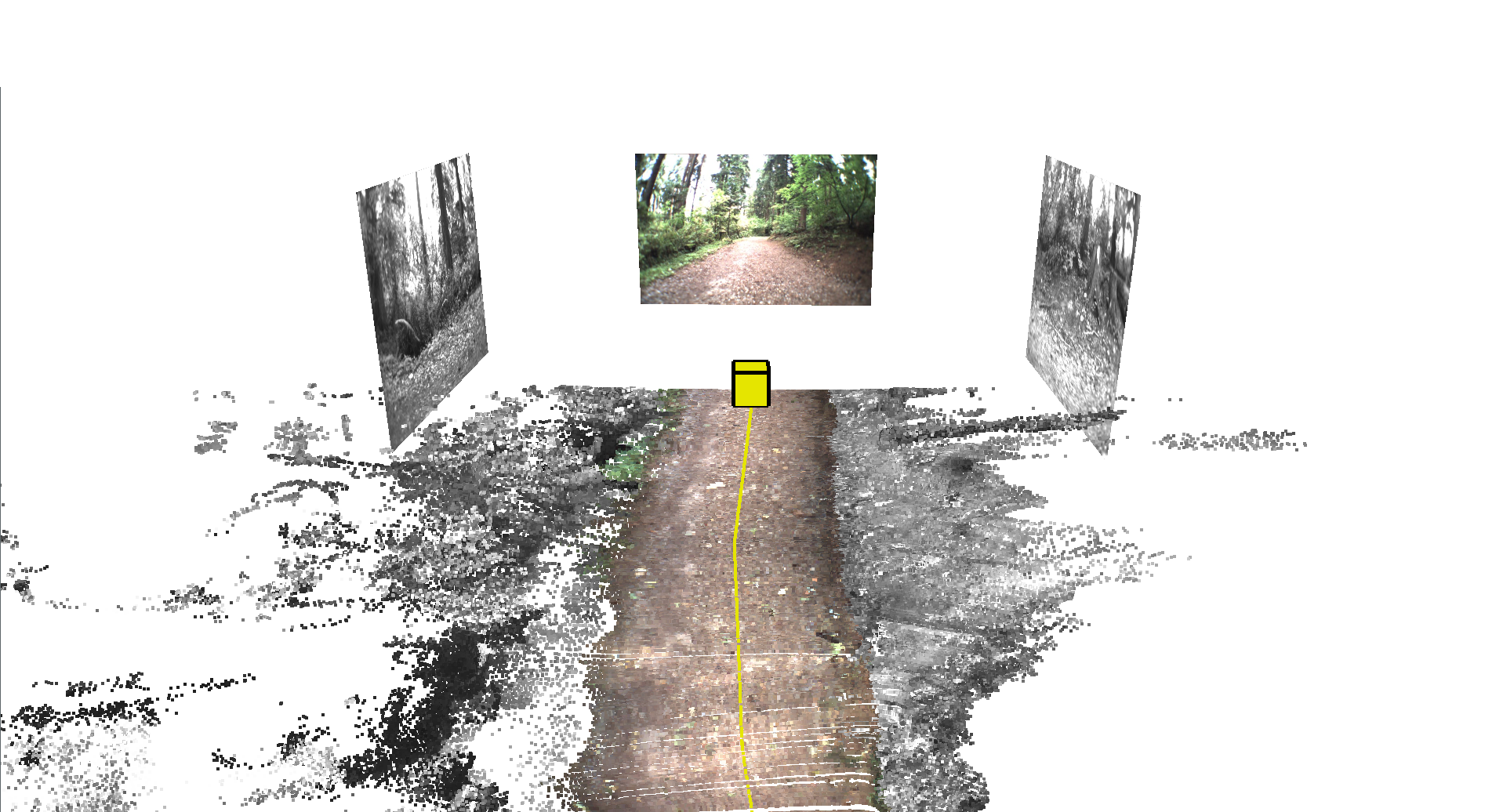
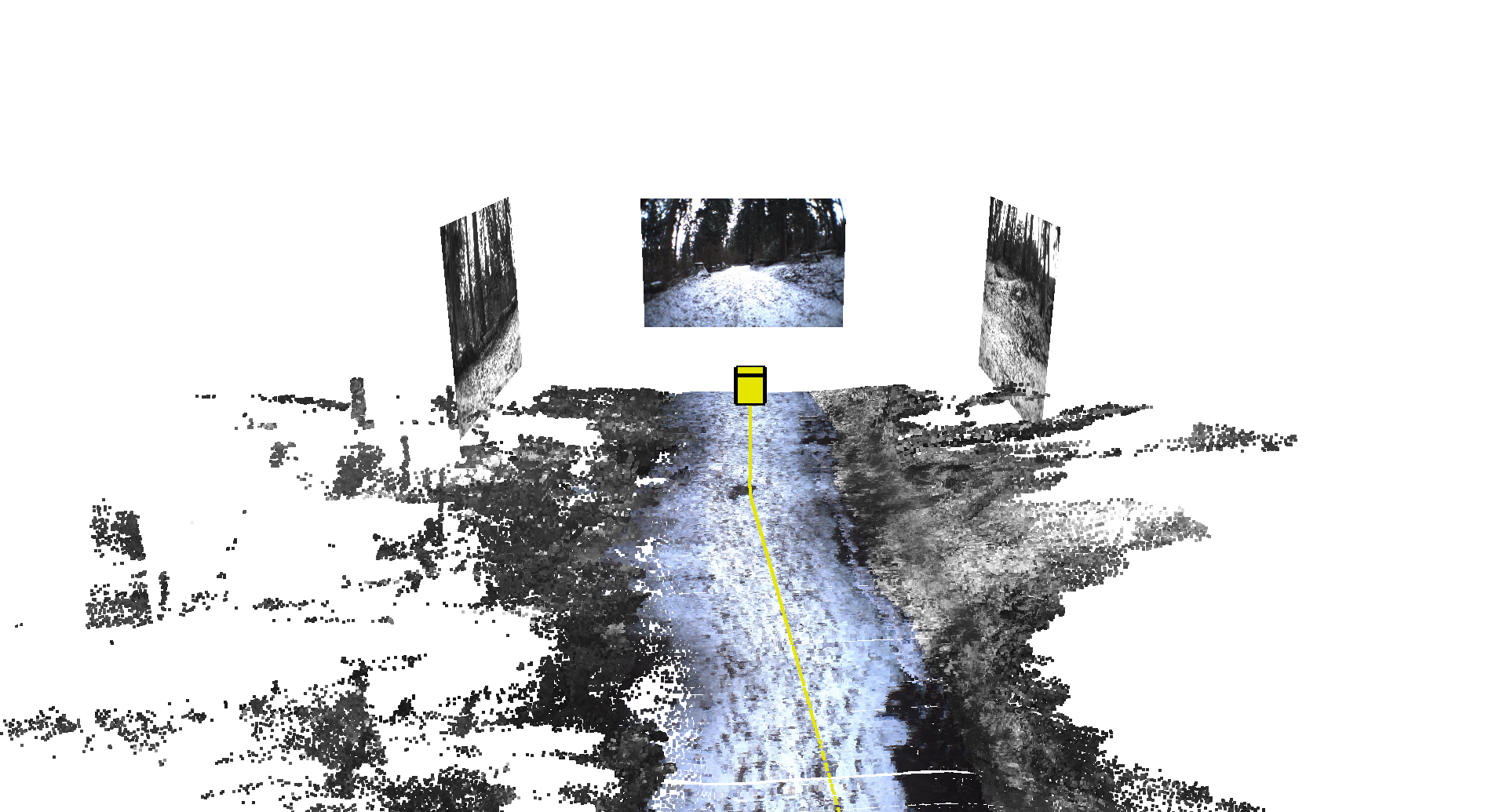
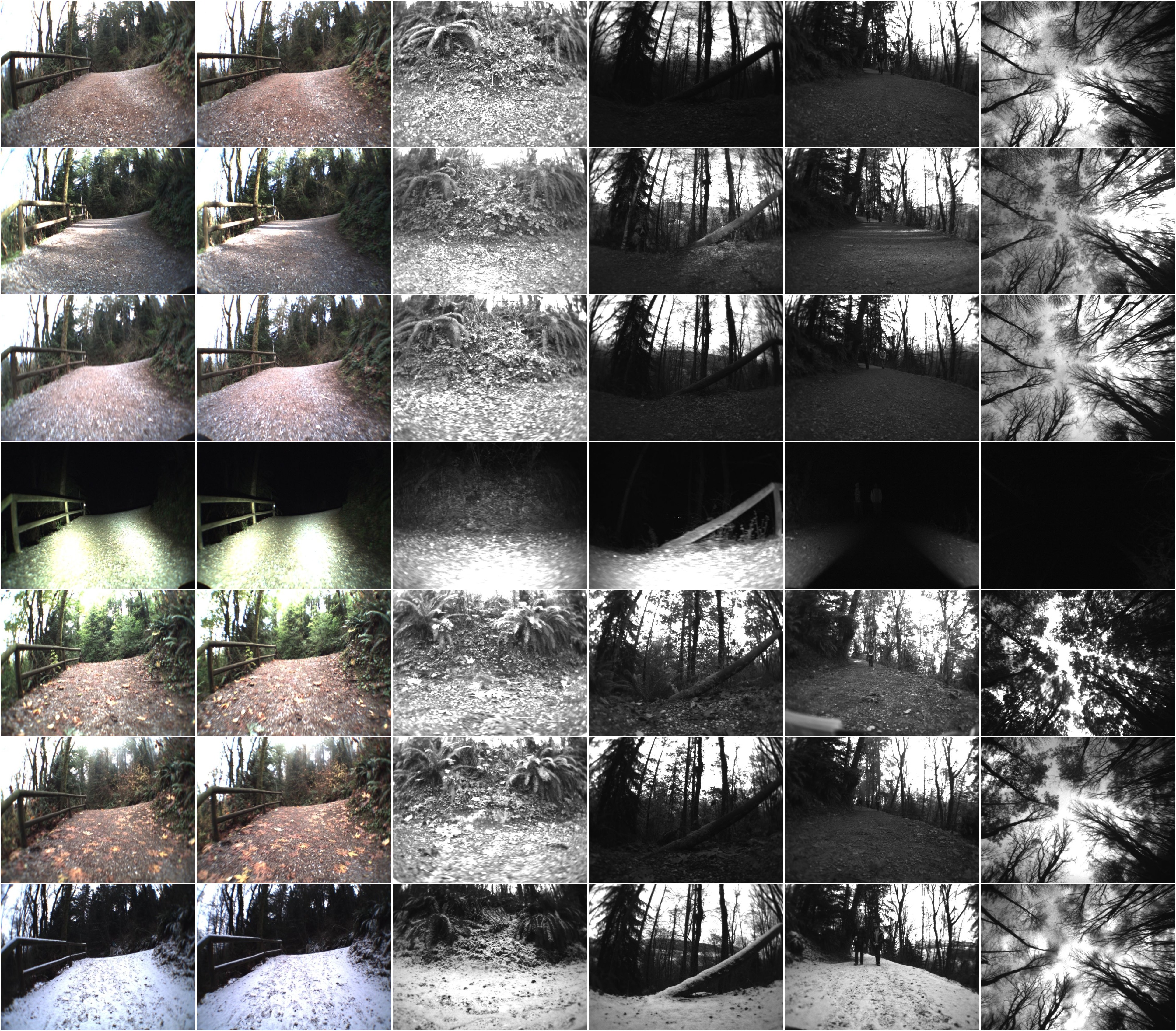
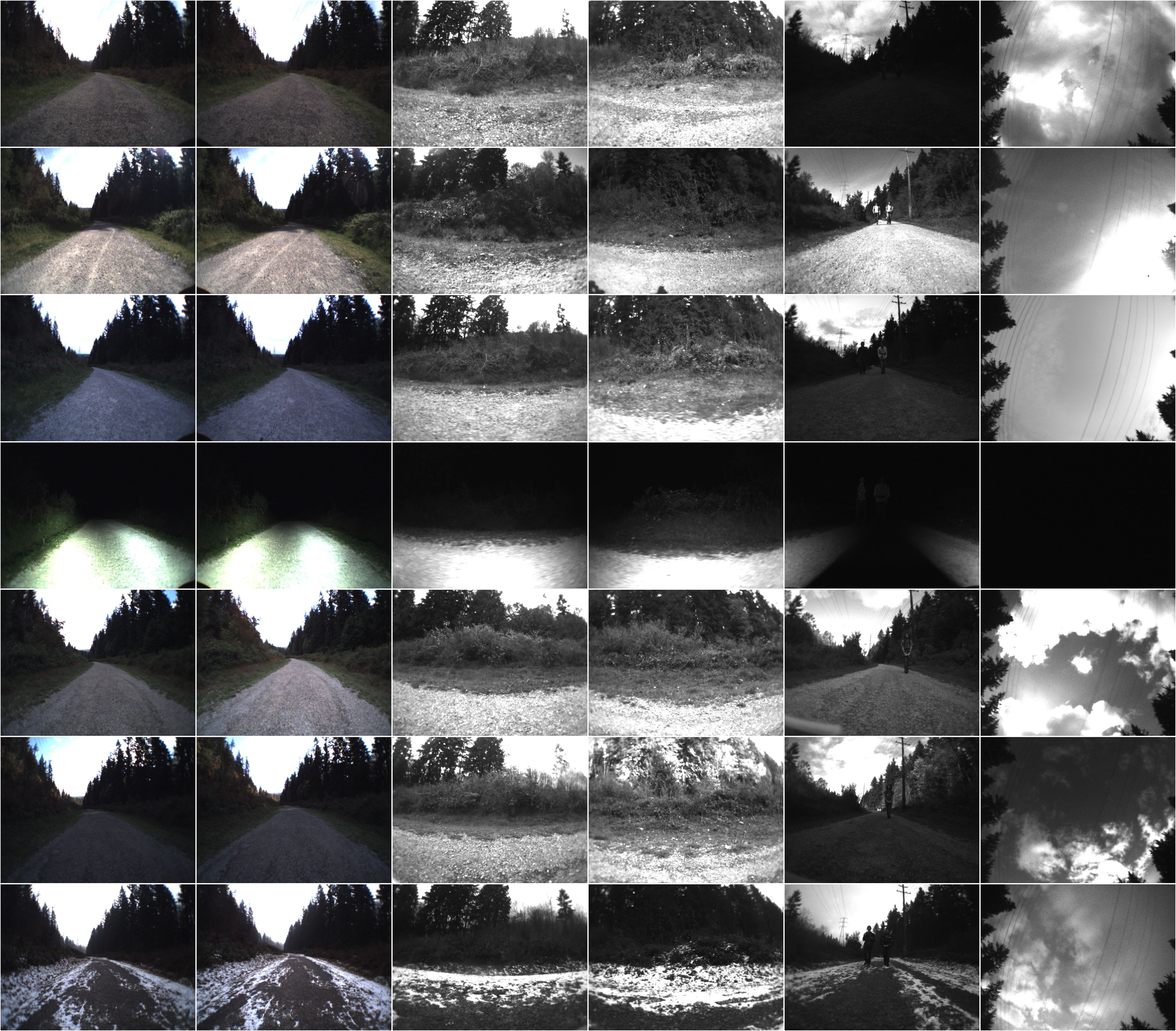
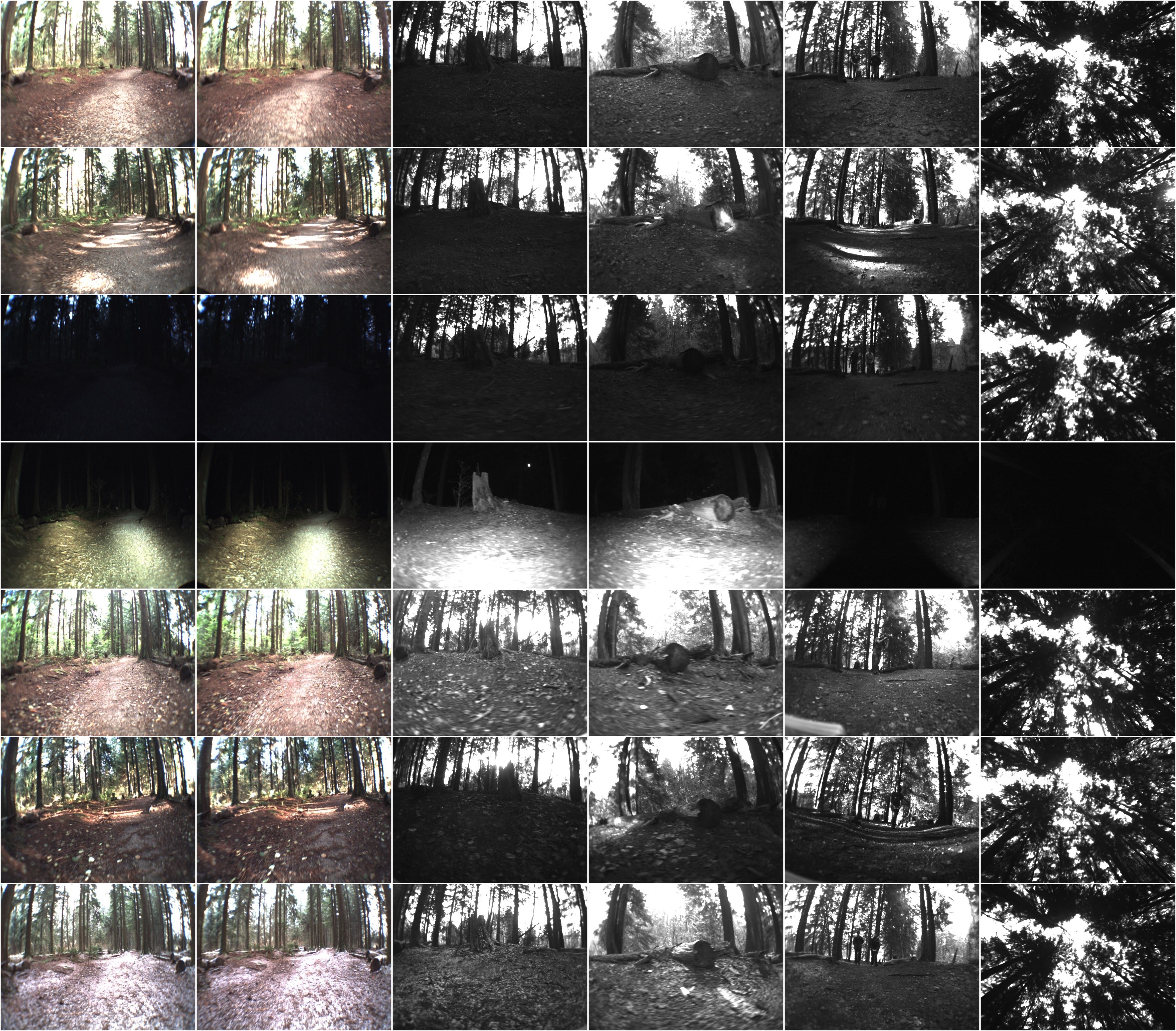
In addition to the raw data, we provide ground-truth timestamped place matches: frames from each camera at locations separated by approximately 10 meters, hand-matched between dry, wet, dusk, night, sept, nov, and jan traversals. Here are some example place matches for each camera across all seven sessions:
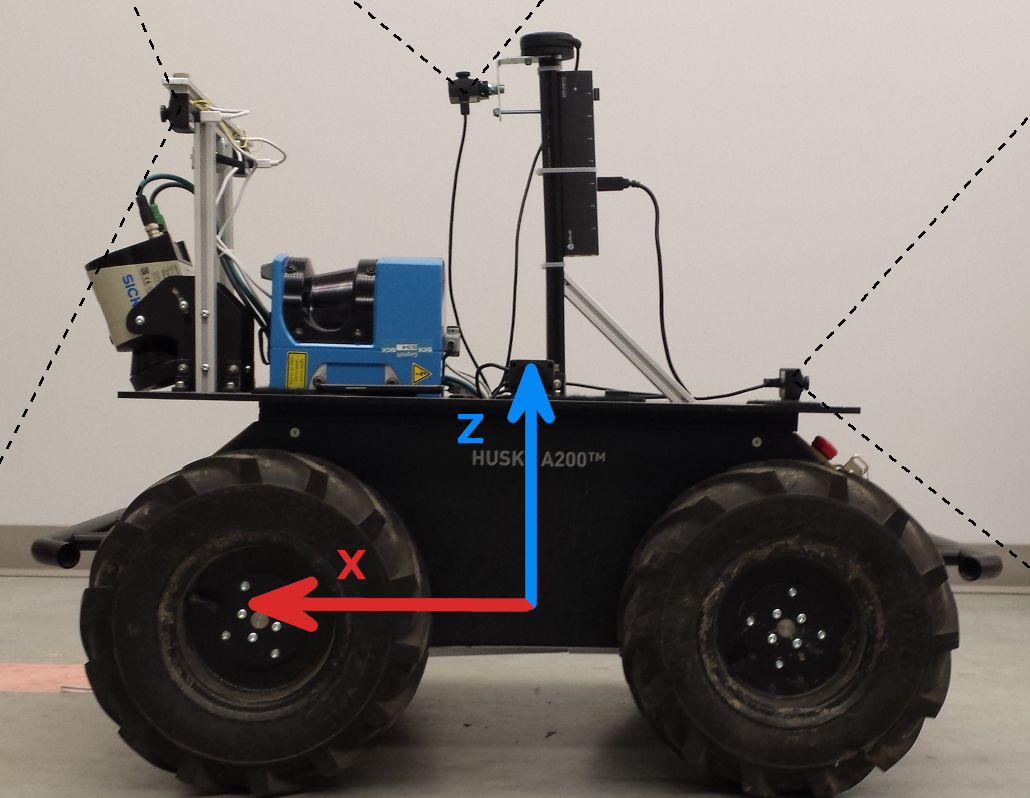
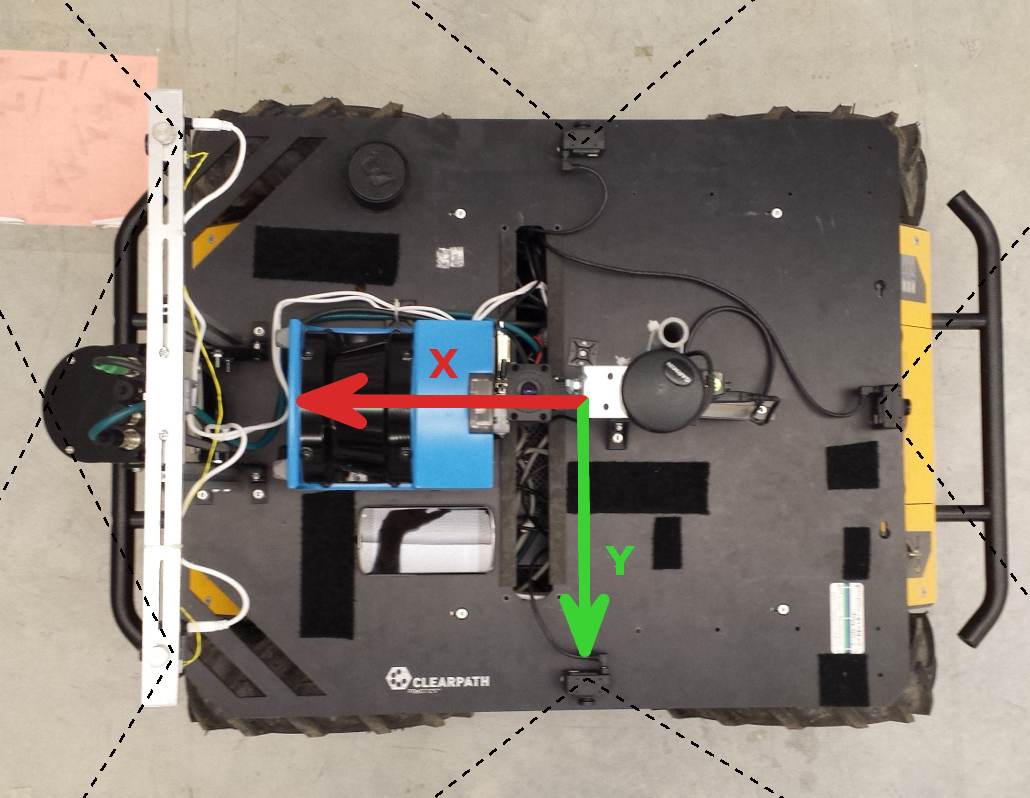
Our trail navigation robot is equipped with the following payload configuration:
- In wet, dry, dusk, and night sessions, the stereo cameras are set up with a wide baseline of 0.423m.
- Sessions sept, nov, and jan have a 0.165m baseline.
For each trail section a and b, we provide hand-aligned place matches in bundles of timestamped frames from 1) all cameras, and 2) just each individual camera:
You can download the dataset via HTTP by clicking the individual links below.
The dataset in its purest form is available as ROS bag files recorded directly from the robot. These are the original recordings from which all other formats were exported; we modified them only to synchronize sensor timestamps.
In addition to the ROS bag files, we provide non-camera sensor data in
CSV text files archived in .tar format. Calibration parameters for each
sensor are included in calibration.yaml if applicable.
JPEG images from the cameras are provided at full 30 Hz, and also at subsampled rates of 3 Hz and 0.3 Hz for convenience.
The timestamps in the preceding bag files, CSV files and JPEG images have all been shifted by subtracting an offset calculated to account for the relative latencies of the different sensors. The offsets are provided here in case they are needed:
| Sensor | Offset (ms) |
|---|---|
| Stereo Left Camera: | 48.4 |
| Stereo Right Camera: | 48.4 |
| Port Camera: | 46.85 |
| Starboard Camera: | 45.5 |
| Upward Camera: | 65.3 |
| Rear Camera: | 58.5 |
| Front Laser: | 67.9 |
| Top Laser: | 379.6 |
| IMU: | 29.2 |
| Wheel Odometry: | 0 (reference sensor) |
In addition to the trail runs described in the paper, we provide five extra recorded sessions using the same robot configuration, but with the front laser scanner oriented in horizontal position instead. One session records a section of the first trail described in the paper, while four other sessions were recorded inside buildings on the SFU campus. This data is provided only in the form of ROS bag files, and we cannot guarantee the same level of calibration quality as in the main dataset.
| Session | Data |
|---|---|
| Outdoor: Trans-Canada Trail | trail_horizontal_laser.bag |
| Indoor: Applied Science Building | sfu_asb_2015-09-16-16-57-12.bag |
| Indoor: TASC1 Floor 7 | sfu_tasc1_2015-09-16-16-35-55.bag |
| Indoor: TASC1 Floor 8 | sfu_tasc1_2015-09-16-16-43-33.bag |
| Indoor: TASC1 Floor 9 | sfu_tasc1_2015-09-16-16-51-06.bag |
If you use this dataset in your research, please cite this paper:
- @conference{sfumountain,
- author = {Bruce, Jake and Wawerla, Jens and Vaughan, Richard},
- title = {The {SFU} Mountain Dataset: Semi-Structured Woodland Trails Under Changing Environmental Conditions},
- booktitle = {IEEE Int. Conf. on Robotics and Automation 2015, Workshop on Visual Place Recognition in Changing Environments},
- year = {2015}
- }
Please note: the current data is an updated version of the dataset, with three new sessions that were not included in the original paper. The new recording sessions are labeled Sept, Nov, and Jan.
This work is licensed under the Creative Commons Attribution-4.0 International License. This means that you are free to distribute transformations of this work as long as you give appropriate credit and indicate if changes were made.

Questions? Feel free to email us at jacob.bruce@hdr.qut.edu.au.

|
